













練習飛行 5日目

本日、念のため機体のオーバーフォールを実施した。
昨日のパワー不足が気になっていたためなのである。
ハンダ付けに不安があるわたくしであることを自覚しているため、自分で付けたハンダ付けは大丈夫かなぁとおもったわけで。。。。
※余談
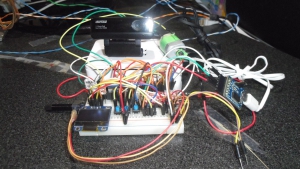
DJI 450 は機体中心部の板(アームを接続する部分)はバッテリーからの電源を各アンプに提供する基板の機能も持っています。
各アンプの電線を中心部の板に+と-でハンダ付けするわけです。 バッテリーの電線もこの板にはんだつ付けする訳なのです。
機体から保存用パックを機体から外しショート防止用に敷いているクッションを外してハンダの状態を確認すると、バッテリーと接続している-極のハンダ付け箇所が外れかけているのを発見です。
さっそく、ハンダ付けを補修しようと思うがアームが邪魔でハンダコテを当てづらい。仕方がないのので邪魔な一部のアームを取りはずすはめとなりました。
問題個所のハンダ付けも補修し、ゆるんだねじはないかもチェックし、オーバーフォールは終了です。
夕方いつもの通り練習飛行に行ってきました。
本日は場所を変えました。 以前より広めの普段はほとんど人が来ない駐車場なのです。
しかし、昨日より風が強い。
プロの方からすると問題ないレベルの風なのかもしれないが私にとってはこれまでの最強です。
意を決して練習をやってみること決めた。
飛行準備作業
- 機体にプロペラを装着(本日は小さい方 8*4.5 を選択)
CW(時計回り正転)、CCW(反時計回り逆転)のアーム取付けを
間違えないように装着しよう。 - 機体にバッテリーを装着
- 機体を飛ばす方向に向けて電源オン
- プロポの電源オン
- 加速度計(acc ※accelerometer)のキャブりケーションの実施
- 磁気計(mag ※magnetometer)のキャブりケーションの実施
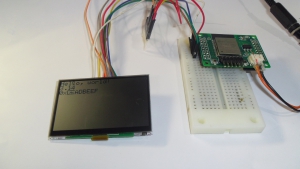
- タブレットで EZ-GUI を使って機体のフライトコントローラの状態をモニタリング
機体の姿勢や GPS の状態を確認
今日からノートPCの MultiWiiConf からこれに変えました。
使いやすさはPCの MultiWiiConf なのですが手軽さは EZ-GUI なのです。
MultiWiiConf は一画面で全ての情報が見れるのでやっぱいいかなぁ。 - ARMオンだけの状態でプロポレバーの動作確認
各アームのモーターの回転方向もちゃんと確認しよう。
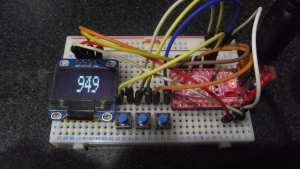
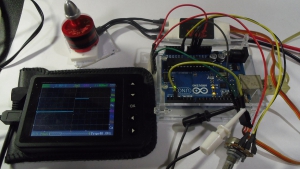
それから、試しに BARO 機能を使ってみました。
※BARO機能とは、barometer の略で気圧計使用した飛行機能のことです。
気圧センサーを使って一定の高度を維持するというものだと理解している。(ネット調べ)
ネットで調べるが使い方までは見つからず BARO 機能を使ってみました。このやり方でよいのかさらなる検証が必要なようです。
離陸前から BARO をオンにするとスロットルをあげてもモーターが反応しなかったので試しにこのような使い方(↑)を試してみました。
新しい機能を始めて使うときは危険ですのでちゃんと調べてから慎重にやりましょう。
私は、機体フレーム、アンプ、モーターは DJI社製を使っていますが、フライトコントローラにはオープンソース開発形態のMultiWiiを使っています。
なので、
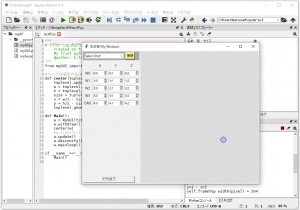
- ソースコードの入手、パラメータの理解と変更、ビルド、書き込み
- MultiWiiConfによるセッティング
- 各種機能がちゃんと働くのかの確認
まだまだ先は長そうです。 溜息出そう。
その後、いつものジョギングをして帰宅。