













ドローン制御の勉強をしてみようー1回目

はじめに
長年考えていながら一向に行動に起こすことができていなかったことに
「ドローンの制御プログラムを自力で作れるだろうか」
ということがあります。
なので、2018年4月~2018年6月の3か月の間、「研究開発」合宿を行って挑戦してみました。
結論からいうと、2018年7月時点で飛ばせるレベルまでは到達出来ませんでした。
ひもで吊り下げたドローンを
- 水平かつ回転しないように自動で保持する制御(自動姿勢制御させる)
- コントローラからのピッチ・ロール・ヨー制御(指示通りに動かす)
をできるところまでは到達出来ました。
これから「吊るし紐を外した状態での飛行実験」に進めたいところなのですが、もろもろの諸事情によりその先に進めていけるだけのキャパ(リソース)が今の私にはないので、ひとまずここで「第一段階」ということにしました。
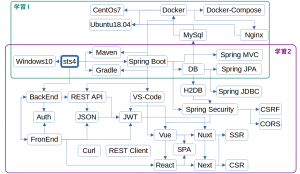
この「研究開発」合宿を通して副産物として次のような「技術の習得」につながったので先ずは「よし」とします。
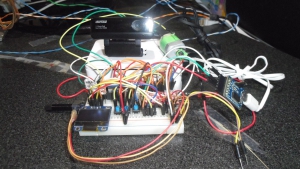
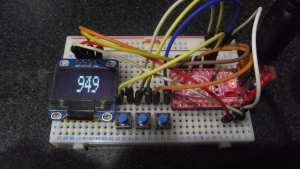
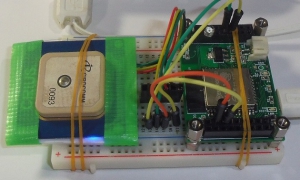
- 姿勢制御に必要なセンサ(ジャイロ、加速度、磁気)の扱い
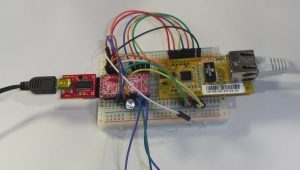
- ラジコンで使用されているレシーバーからのデータの取得
- モータ制御に必要なPID制御の習得
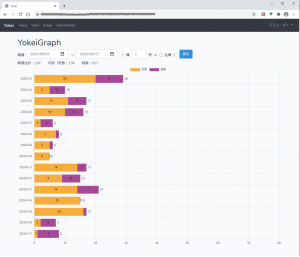
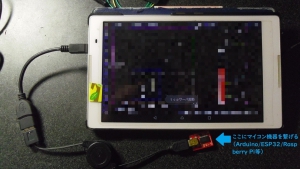
- 各種状態のデータのリアルタイム表示方法
- 等々
そこで、他人には何の役にも立たないと思いますが「自己整理」を目的として、私の「研究開発」合宿でどんなことを行ったかを振り返って「ドローンの制御プログラムの開発レポート」として書いていきたいと思います。
本題は次回からということで。。。。